QHY42 PRO UV Scientific Cooled CMOS Camera
Starting Price: $15,235.00
Price as Configured: $15,235.00
Price as Configured: $15,235.00
Brand: QHYCCD / SKU: QHY-42UV (110030)
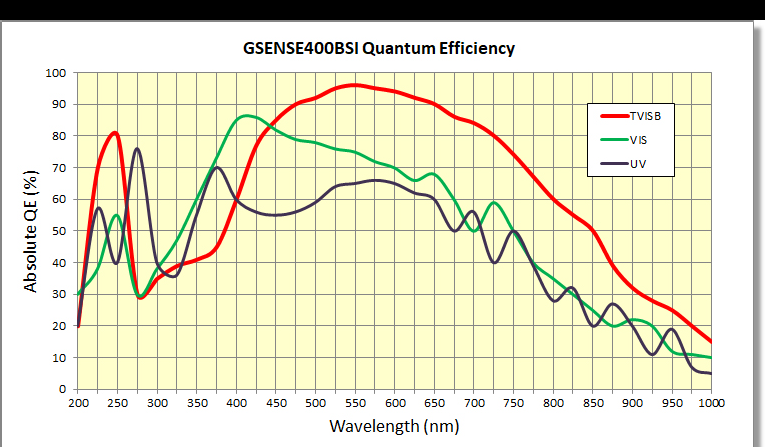
The QHY42PRO-BSI uses the Gsense400 Scientific CMOS sensor with extraordinary 95% peak QE, 79% UV QE, and very good NIR response, plus an extremely low read noise of 1.7e-. The QHY42 has relatively large 11um pixels in a 2k x 2k array. The sensor size is 22.5mm x 22.5mm yielding a good field of view even at longer focal lengths. This camera is ideal for astronomical and biological science research. QHYCCD also supplies the QHY42PRO-FSI version.
SHIPPING NOTE: Shipping cost will be determined after the order is made and must be paid before the camera will ship. A shipping quote can be obtained on request.

Need help deciding?
Tell us what you're looking for, and we’ll point you in the right direction. Email Us.
Tell us what you're looking for, and we’ll point you in the right direction. Email Us.
- Cooled scientific camera uses the Gsense400 BSI CMOS sensor
- Ultra High Sensitivity - with extraordinary 95% peak QE (Back-Illuminated)
- Ultra Low Read Noise1.7e-Photon Counting
- Large Pixel Size - 11um, 89ke- Full Well Capacity
- With 24FPS in HDR mode and 48FPS in STD mode
- Dual 12-bit A/D
- With Amplifier Glow Control and Electronic Rolling Shutter
- Sensor free of Microlenses
- Two-stage Thermoelectric Cooling (TE) and USB3.0 interface
- Ideal for astronomical and biological science research
- UV enhanced version available
The standard version has 2-stage TE cooling and a USB3.0 interface. The camera has three readout modes: single 12bit high gain channel output, single 12bit low gain channel output. Dual 12bit high gain and low gain output mode. Single channel output is 24FPS at 12-bits. Dual-channel HDR output is 12FPS at 12-bits.
QHY42PRO has the GPS / Trig Signal interface. It can output the precise exposure starting/ending waveform for external measurement. It can also connect with QHYCCD GPS-BOX to measure it. The QHYCCD GPS-BOX will output the timestamp onto the image head of each frame.
Models